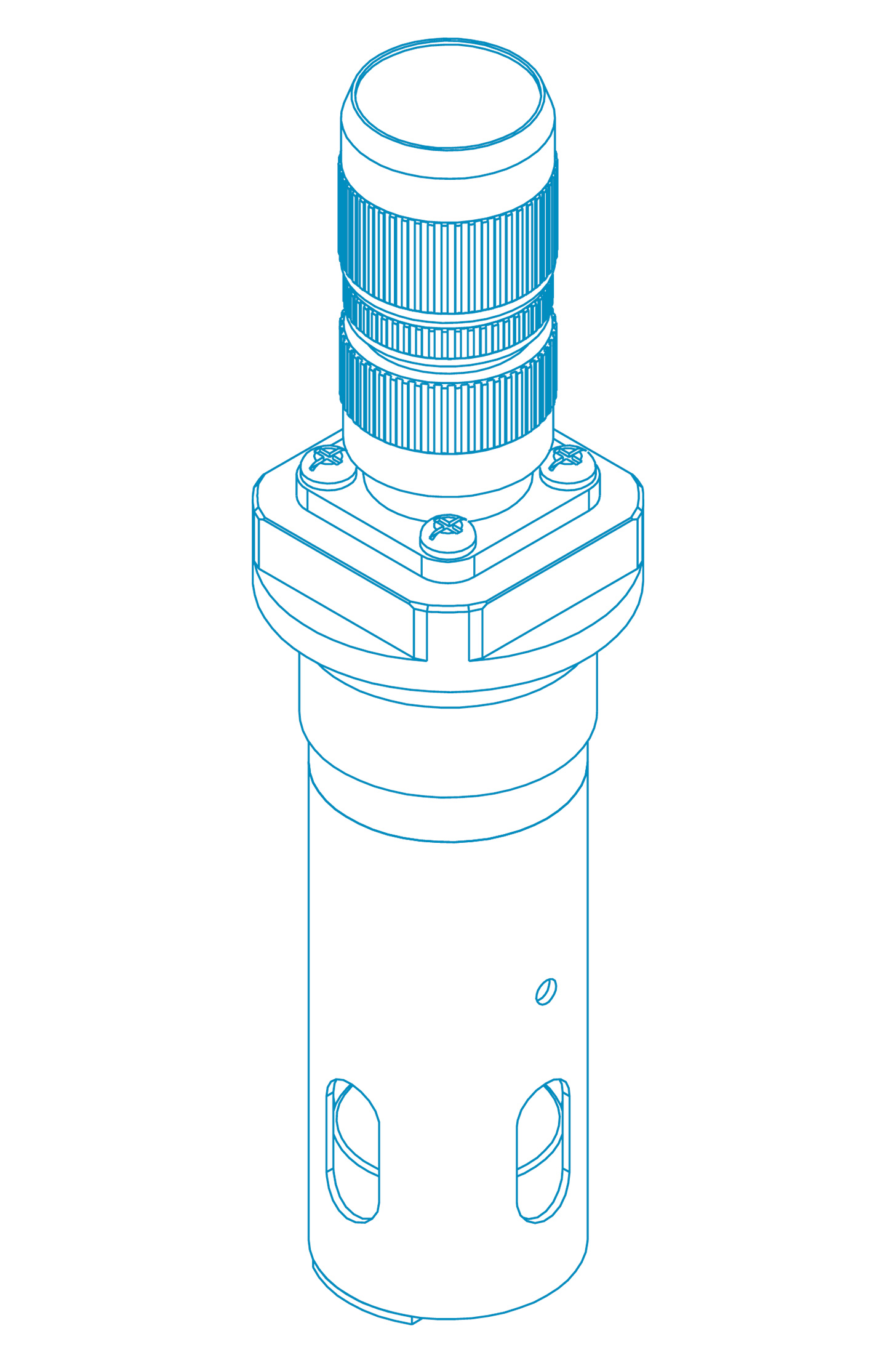
Il principio di funzionamento si basa sul movimento di un galleggiante contenente un magnete permanente lungo l'asse del sensore. Al raggiungimento della posizione di intervento, il campo magnetico aziona il contatto reed generandone la commutazione elettrica.
I sensori possono essere realizzati con contatti normalmente aperti (N.A.) o normalmente chiusi (N.C.) e sono caratterizzati da un differenziale di intervento (isteresi) che garantisce una commutazione stabile anche in presenza di oscillazioni del livello del fluido. In funzione dell'applicazione, il differenziale può essere ottimizzato mediante specifiche configurazioni del sistema magnetico e del contatto reed.